EP0572492B1 - Method and apparatus for attenuating acoustic vibrations in a medium - Google Patents
Method and apparatus for attenuating acoustic vibrations in a medium Download PDFInfo
- Publication number
- EP0572492B1 EP0572492B1 EP92905463A EP92905463A EP0572492B1 EP 0572492 B1 EP0572492 B1 EP 0572492B1 EP 92905463 A EP92905463 A EP 92905463A EP 92905463 A EP92905463 A EP 92905463A EP 0572492 B1 EP0572492 B1 EP 0572492B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- resonator
- signal
- medium
- frequency
- selected frequency
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images


Classifications
-
- G—PHYSICS
- G10—MUSICAL INSTRUMENTS; ACOUSTICS
- G10K—SOUND-PRODUCING DEVICES; METHODS OR DEVICES FOR PROTECTING AGAINST, OR FOR DAMPING, NOISE OR OTHER ACOUSTIC WAVES IN GENERAL; ACOUSTICS NOT OTHERWISE PROVIDED FOR
- G10K11/00—Methods or devices for transmitting, conducting or directing sound in general; Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/16—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general
- G10K11/172—Methods or devices for protecting against, or for damping, noise or other acoustic waves in general using resonance effects
Definitions
- This invention relates to a method and apparatus for attenuating acoustic vibrations in a medium, and more particularly to a method and apparatus to control a tunable acoustic resonator to effect such attenuation.
- an acoustic resonator can be used to attenuate acoustic vibration in a system (DE 3729765).
- the resonant frequency of the resonator and hence the frequency of the acoustic vibrations that are attenuated in a system is dependent on the dimensions and structure or type of resonator employed.
- resonators of fixed structure are employed as disclosed in DE 3729765. This arrangement is however limited in that if the frequency of the acoustic vibration to be attenuated changes, then the efficiency of the resonator as an attenuator decreases as the frequency moves away from the resonant frequency.
- a resonator is disclosed in EP 0039459 which attempts to overcome this limitation in relation to the use of a resonator to attenuate the noise generated by a turbo machine.
- Two specific types of resonators are disclosed, one being a quarter wave resonator and the other being a Helmholtz resonator.
- the resonant frequency of the quarter wave resonator is varied by varying the length of pipe, whilst the resonant frequency of the Helmholtz resonator is varied by varying the volume of the resonant chamber.
- the resonant frequency is variable to enable attenuation of unwanted variable frequency acoustic vibrations created by the turbo machine. This document does not however address the problem of how such resonators can be accurately controlled.
- the present invention provides apparatus for attenuating acoustic vibrations in a medium, said apparatus comprising a tunable acoustic resonator with an open end for interfacing with said medium outside of said resonator, at least one transducer to provide a first signal indicative of a dynamic parameter of the medium within said resonator, and a resonator controller operable in response to said first signal to tune said resonator to a selected frequency of said acoustic vibrations.
- the present invention also provides a method of attenuating acoustic vibrations in a medium comprising the steps of interfacing a tunable acoustic resonator with said medium outside of said resonator, measuring a dynamic parameter of the medium within said resonator to give a first signal, and tuning said resonator to a selected frequency of said acoustic vibrations in response to said first signal.
- the present invention is applicable to any acoustic resonators such as a quarter wave resonator, a Helmholtz resonator or a mechanical resonator.
- the first signal can provide a measure of the dynamic pressure at a point within the resonant chamber.
- the first signal can provide a measure of the motion of the oscillating mass. If an air chamber is used as the spring for a mechanical resonator then the first signal can provide a measure of the dynamic pressure within the chamber.
- the resonator controller is operative to determine said selected frequency in response to a predetermined characteristic of said first signal and to tune said resonator so as to maximise the amplitude of said first signal at said selected frequency.
- the present invention can provide for the adaptive control of a resonator without the need for any external signal indicating the frequency of the acoustic vibrations to be attenuated.
- an algorithm would be performed using digital processing apparatus which had stored the characteristics of the resonator and which could therefore calculate the frequency of the acoustic vibrations reaching the resonator and attenuate the frequency with the largest amplitude for example.
- the processing apparatus in this instance has knowledge of the dimensions of the resonator for example. This could be obtained from knowledge of for example the position of a piston moveable to vary the resonant volume in a Helmholtz or quarter wave resonator.
- the processor may alternatively be an analogue processor.
- a reference means provides a reference signal indicative of said selected frequency and the resonator controller is operative to tune said resonator so as to maximise the amplitude of said first signal at said selected frequency.
- An arrangement that can accomplish this comprises a filter means to band-pass filter the first signal at the reference signal frequency, wherein said resonator controller is operative to tune said resonator so as to maximise the amplitude of the band-pass filtered first signal.
- the apparatus includes a second signal indicative of a dynamic parameter of said medium outside of said resonator and reference means providing a reference signal indicative of said selected frequency, wherein said resonator controller is operative to tune said resonator so as to maintain the phase difference between the first and second signals at said selected frequency substantially at 90°.
- the resonator controller preferably includes a band-pass filter for each of said first and second signals, to band-pass filter each resonator signal at said reference signal frequency, a multiplier to receive the filtered first and second signals and output a combined signal and an integrator or low pass filter to receive the combined signal and output a resonator control signal.
- a transducer can be provided in the medium to provide the second signal indicative of the dynamic pressure within the medium outside of said resonator.
- the second transducer provides a measure of the force applied to the resonator whilst the first transducer provides a measure of the response by the resonator to that force.
- the present invention is applicable for use in the reduction of transmission of acoustic vibrations along a duct, and in particular to the reduction of acoustic vibrations along an exhaust or inlet pipe of an internal combustion engine; although the present invention is by no means limited as such and may be used to reduce unwanted acoustic vibrations in any system.
- the reference means may comprise either a peak detection filter to detect the frequency of the acoustic vibrations with the largest amplitude, or it can provide a synchronising signal to the rotation rate of the engine.
- the resonator controller is operative to detect the frequency of the acoustic vibrations with the largest amplitude by utilising its knowledge of the characteristics of the resonator.
- Figure 1 illustrates three types of resonators that can be employed in cancelling undesired acoustic vibration.
- the resonators are shown connected to a duct 2, although the present invention is not limited as such.
- the resonator could be a Helmholtz resonator 1 where the air mass in the neck oscillates on the natural spring created by the air in the bulb. Damping is produced partly by flow effects in the neck, but mainly by sound radiation into the duct.
- ⁇ o C S lV
- the resonant frequency of the resonator can be adjusted by adjustinq the neck length, neck area or bulb volume.
- the resonator could be a quarter wave length resonator 3, which can be viewed as a special case of a Helmholtz resonator, where the neck and the bulb have the same diameter.
- the effective mass and stiffness are both continuous.
- the resonant frequency of the quarter wave length resonator can be adjusted by varying the length of the side branch. This can be implemented for example by using a sliding piston.
- the resonator can also be a mechanical resonator 4 with a piston of mass M on a spring in a side branch.
- the most simple arrangement is to adjust the spring stiffness. This could be adjusted for example by having a variable rate spring or a compressed gas spring where the spring stiffness is proportional to the gas pressure.
- any one or more of these three parameters can be measured.
- accurate control of the resonator can be implemented since the accurate resonant frequency of the resonator is known.
- the measurement of, for instance, gas pressure within the resonator has the advantage of automatically compensating for any temperature variations that may occur between the medium in which the undesired acoustic vibrations are being transmitted and the medium contained within the resonant cavity.
- control schemes that can be used to ensure that resonance is obtained at the desired frequency can be based on the three common behavioural characteristics of the resonator at resonance in that:
- the third control arrangement has the advantage that by measuring the phase, one has direct knowledge of which direction to make adjustments of the resonance frequency of the resonator, thus making adaption very fast and robust.
- the control system is fully adaptive and can respond to local changes in the environment (sound, speed, temperature, etc.).
- the required parameters of the resonator can be measured using transducers and the output of these transducers can be filtered so as to be sensitive only to the frequency of interest, i.e. the undesired acoustic vibration frequency. This frequency is selected according to the desired function of the resonator.
- any of the resonators hereinbefore described are attached to attenuate acoustic vibrations in a medium (e.g. in a duct), sound travelling in the medium (along the duct) will be reflected at the point of fixture. This is how the resonators operate to minimise transmission of acoustic vibrations through the medium.
- a resonator can be used in the inlet or exhaust of an internal combustion engine to minimise transmitted sound especially at the resonant frequency or frequencies.
- the resonator can be automatically tuned by adjusting its effective mass or spring parameters.
- the frequency of interest can be selected in several ways. It can have a fixed relation to one harmonic of the engine and can be obtained from an engine tachometer signal for example. Alternatively, it can automatically be chosen to be the frequency at which attenuation would be the most effective at any given time. This could be achieved by identifying the loudest frequency component from for example a tailpipe or inlet microphone and the resonator could be adapted to that frequency.
- a resonator controller could have stored in a memory the characteristics of the resonator and could perform an algorithm to ascertain the frequency of the acoustic vibrations impinging on the open end of the resonator having the largest amplitude. The resonator could then be tuned to this frequency.
- resonators need not be confined to use in ducts.
- the resonators may be used to control noise in a volume such as a vehicle cabin and to improve the efficiency of acoustic attenuation an array of such resonators may be used.
- Figure 2 illustrates a quarter wave resonator 3, attached to a duct 2 via an open end 5.
- the length of the side branch and hence the resonant frequency of the resonator is adjustable using a piston 6 attached to a movable far end wall 7 of the resonator.
- the piston 6 is driven by a motor 8 which is controlled by a control signal transmitted on line 9.
- the transducer 11 provides a measure of the dynamic pressure of the gas at the far end wall of the resonator.
- Signals from the transducer 11 are filtered by a band-pass filter 12, the centre frequency of which is controlled by a signal on line 13 which in this example of this invention is provided from a tachometer 14 of an internal combustion engine.
- the band-pass filter filters the dynamic pressure signals from the transducer 11 to provide a measure of the dynamic pressure at the selected frequency of the acoustic vibrations to be attenuated.
- the output signal from the band-pass filter 12 is then input into a maximum signal detector 15 which detects any decrease in the amplitude of the signal at the required frequency. If a decrease is detected then a signal is output via the amplifier 16 on line 9 to the motor to move the piston 6 and the far end wall 7 to adjust the resonant frequency of the resonator.
- FIG. 3 illustrates a second embodiment of the present invention in which a Helmholtz resonator 1 is connected to a duct 2 via a neck portion 20.
- the Helmholtz resonator has a resonant chamber 21 the volume of which can be varied by moving a far end wall 22 by the action of a piston 6 driven by a motor 8.
- a neck insert 25 which is attached to the far end wall 22 and moves therewith in unison.
- the pressure of the gas within the resonant cavity 21 is measured by a transducer 26 whilst the pressure of the gas in the duct 2 is measured by transducer 27.
- the signals from these two transducers 26 and 27 are individually filtered by band-pass filters 31 and 32 the centre frequencies of which are controlled by a signal on line 28.
- the signal on line 28 represents the selected frequency of the acoustic vibrations to be attenuated, and this signal is provided from filter 29 by peak selection filtering of a signal representing the acoustic vibrations at a position in the duct upstream of the resonator as measured by a transducer 30.
- the selected frequency of the filtered acoustic vibrations that are to be attenuated is decided by selecting the acoustic vibrations in the duct having the largest amplitude.
- the signals from the transducers 26 and 27 after having been filtered by band-pass filters 31 and 32 are multiplied together by the multiplier 33.
- the multiplied signal from the multiplier 33 is then applied to an integrator 34 which supplies the resonator control signal on line 35 to the motor 34 to move the piston 23 and far end wall 22 in order to change the resonant cavity volume, and hence the resonant frequency of the resonator.
- the neck length as well as the volume of the Helmholtz resonator is varied. This provides for extra sensitivity, although only one parameter need be varied.
- the two filtered pressure signals provided from transducers 26 and 27 after filtering in the band-pass filters 31 and 32, will generally have a phase difference of ⁇ between them.
- x(t) k/2 (Cos ⁇ - Cos(2w o t+ ⁇ ))
- the integrator output, y(t) will be approximately y(t) ⁇ k/2 Cos ⁇ (t)
- a low pass filter could alternatively be used instead of the integrator 34 to provide y(t).
- FIG. 4 this diagram illustrates the use of a mechanical resonator 4 attached to a duct 2 for a fluid or gas medium.
- the mechanical resonator comprises a mass 40 suspended at the interface between the resonator 4 and the duct 2 by a diaphragm 41.
- the diaphragm 41 forms an airtight seal across the interface sealing gas in a cavity 42.
- the cavity 42 has a preset regulator valve 43 regulating gas provided by a pump 44.
- the cavity 42 also has a motorised valve 45 to control the pressure there within.
- a transducer in the form of a microphone 27 is provided within the duct adjacent to the interface with the resonator to provide a measure of the pressure in the duct and hence the force applied to the resonator.
- a transducer 47 providing signals indicative of the pressure within the cavity 42.
- the signals from the transducers 27 and 47 are band-pass filtered in filters 31 and 32 with the centre frequency of the filters 31 and 32 controlled by a signal on line 13.
- the signal on line 13 provides a signal representative of the selected frequency of the acoustic vibrations to be attenuated.
- such a signal is provided from the tachometer 14 of an internal combustion engine.
- the filtered signals from the transducers 27 and 47 are then multiplied in the multiplier 33 and the combined signal integrated in integrator 34 to provide the resonator control signal on line 35 which is amplified in amplifier 16 to provide the control signal which controls the motorised valve 45 in order to control the pressure of the gas within the cavity 42.
- the pump 44 provides a constant head of pressure which can be controlled by the preset regulator valve 43, and the pressure in the resonator cavity 42 is varied by opening or closing the motorised valve 45.
- ⁇ o 1 2 ⁇ K eff M
- K eff K 1 + K 2
- this diagram illustrates a Helmholtz resonator 1 connected to a duct 2 via a neck 20.
- the volume of the cavity 21 within the resonator is varied by partially filling it with an incompressible fluid 60.
- the control arrangement illustrated in this diagram is the same as that illustrated in Figure 2 for the quarter wave resonator and like reference numerals denote like components.
- the resonator control signal produced by the controller controls a positive displacement pump 61 which pumps fluid either from or to the reservoir 62.
- FIG. 6 this diagram illustrates use of the same control system as described in Figures 2 and 5 to control a mechanical resonator 4.
- the mass 40 is provided with an accelerometer 46 which measures the motion of the mass 40.
- the signal provided from the accelerometer is equivalent to that provided by the transducer 47 in Figure 4.
- the signal from this is then utilised by the control system as described in relation to Figures 2 and 5 to control the motorised valve 45 as described with respect to Figure 4.
- the resonator controller is different and comprises a digital processing apparatus 70 which has stored characteristics of the resonator to enable it to deconvolve the effects of the resonator on the acoustic vibrations impinging on the open end 5 of the resonator and hence determine the frequency component of the acoustic noise with the largest amplitude.
- a control signal is then output on line 9 to the motor 8 to tune the resonator to the frequency at which the largest amplitude has been detected.
- the characteristics of the resonator need be input to the processor only once and the system needs no reference signals. This system could be used where only small changes in the fluid properties (temperature etc.) are expected.
- a first signal indicative of the vibrations in the resonator 1, 3 or 4 is band-pass filtered with the centre frequency of the band-pass filter 12 being set at the selected frequency of the acoustic vibrations to be attenuated, the centre frequency being controlled by a second signal on the line 13.
- the amplitude of this filtered signal is then detected by a maximum signal detector 15 and a resonator control signal output to maximise the amplitude of the measured first signal at the selected frequency of the acoustic vibrations to be attenuated.
- the first signal can either be a measure of the motion of the mass 40 in a mechanical resonator 4 or it can be a measure of the pressure at a point within the resonant cavity 10 or 21 of either a quarter wave or Helmholtz resonator.
- First signals from the first transducers 26 and 47 and second signals from the second transducers 27 are band-pass filtered at the selected frequency of the acoustic vibration to be attenuated.
- the filtered signals are then multiplied and integrated or filtered to provide a resonator control signal on line 35.
- the resonator control signal will be output whenever the phase difference between the signals from the first and second transducers 26 and 27 or from the first and second transducers 47 and 27 strays from a value of approximately 90°. It is a condition of resonance that to a good approximation the phase difference between these two signals should be 90° and therefore any deviation from this phase difference indicates a drift from resonance.
- This technique has the advantage that the resonator control signal output from the integrator 34 gives an indication of the direction in which to adjust the resonant frequency.
- a resonator and control system as hereinbefore described is used to cancel undesired acoustic noise in a duct, it may be the case that significant force is transmitted to the resonator housing by the action of the resonator.
- a symmetric arrangement of resonators, or a resonator of intrinsic axial symmetry can be used.
- control systems illustrated in Figures 2 to 6 may be implemented either digitally or in an analogue manner.
- the present invention can thus provide a compact unit comprising a resonator and a control system for use in the attenuation of undesired acoustic vibrations in a system such as a duct.
Abstract
Description
- This invention relates to a method and apparatus for attenuating acoustic vibrations in a medium, and more particularly to a method and apparatus to control a tunable acoustic resonator to effect such attenuation.
- It is well known that an acoustic resonator can be used to attenuate acoustic vibration in a system (DE 3729765). However, the resonant frequency of the resonator and hence the frequency of the acoustic vibrations that are attenuated in a system is dependent on the dimensions and structure or type of resonator employed. In a simple case where attenuation is required of acoustic vibrations at a fixed frequency, resonators of fixed structure are employed as disclosed in DE 3729765. This arrangement is however limited in that if the frequency of the acoustic vibration to be attenuated changes, then the efficiency of the resonator as an attenuator decreases as the frequency moves away from the resonant frequency.
- A resonator is disclosed in EP 0039459 which attempts to overcome this limitation in relation to the use of a resonator to attenuate the noise generated by a turbo machine. Two specific types of resonators are disclosed, one being a quarter wave resonator and the other being a Helmholtz resonator. The resonant frequency of the quarter wave resonator is varied by varying the length of pipe, whilst the resonant frequency of the Helmholtz resonator is varied by varying the volume of the resonant chamber. Thus the resonant frequency is variable to enable attenuation of unwanted variable frequency acoustic vibrations created by the turbo machine. This document does not however address the problem of how such resonators can be accurately controlled.
- The present invention provides apparatus for attenuating acoustic vibrations in a medium, said apparatus comprising a tunable acoustic resonator with an open end for interfacing with said medium outside of said resonator, at least one transducer to provide a first signal indicative of a dynamic parameter of the medium within said resonator, and a resonator controller operable in response to said first signal to tune said resonator to a selected frequency of said acoustic vibrations.
- The present invention also provides a method of attenuating acoustic vibrations in a medium comprising the steps of interfacing a tunable acoustic resonator with said medium outside of said resonator, measuring a dynamic parameter of the medium within said resonator to give a first signal, and tuning said resonator to a selected frequency of said acoustic vibrations in response to said first signal.
- The present invention is applicable to any acoustic resonators such as a quarter wave resonator, a Helmholtz resonator or a mechanical resonator. When a Helmholtz resonator or quarter wave resonator is used, the first signal can provide a measure of the dynamic pressure at a point within the resonant chamber. When a mechanical resonator is used, the first signal can provide a measure of the motion of the oscillating mass. If an air chamber is used as the spring for a mechanical resonator then the first signal can provide a measure of the dynamic pressure within the chamber.
- In one aspect of the present invention the resonator controller is operative to determine said selected frequency in response to a predetermined characteristic of said first signal and to tune said resonator so as to maximise the amplitude of said first signal at said selected frequency.
- Thus, the present invention can provide for the adaptive control of a resonator without the need for any external signal indicating the frequency of the acoustic vibrations to be attenuated. In this aspect conveniently an algorithm would be performed using digital processing apparatus which had stored the characteristics of the resonator and which could therefore calculate the frequency of the acoustic vibrations reaching the resonator and attenuate the frequency with the largest amplitude for example. The processing apparatus in this instance has knowledge of the dimensions of the resonator for example. This could be obtained from knowledge of for example the position of a piston moveable to vary the resonant volume in a Helmholtz or quarter wave resonator. The processor may alternatively be an analogue processor.
- In another aspect of the present invention a reference means provides a reference signal indicative of said selected frequency and the resonator controller is operative to tune said resonator so as to maximise the amplitude of said first signal at said selected frequency. An arrangement that can accomplish this comprises a filter means to band-pass filter the first signal at the reference signal frequency, wherein said resonator controller is operative to tune said resonator so as to maximise the amplitude of the band-pass filtered first signal.
- In a further aspect of the present invention the apparatus includes a second signal indicative of a dynamic parameter of said medium outside of said resonator and reference means providing a reference signal indicative of said selected frequency, wherein said resonator controller is operative to tune said resonator so as to maintain the phase difference between the first and second signals at said selected frequency substantially at 90°. In such an arrangement the resonator controller preferably includes a band-pass filter for each of said first and second signals, to band-pass filter each resonator signal at said reference signal frequency, a multiplier to receive the filtered first and second signals and output a combined signal and an integrator or low pass filter to receive the combined signal and output a resonator control signal.
- A transducer can be provided in the medium to provide the second signal indicative of the dynamic pressure within the medium outside of said resonator. Thus in this aspect of the invention two different signals are provided. The second transducer provides a measure of the force applied to the resonator whilst the first transducer provides a measure of the response by the resonator to that force.
- The present invention is applicable for use in the reduction of transmission of acoustic vibrations along a duct, and in particular to the reduction of acoustic vibrations along an exhaust or inlet pipe of an internal combustion engine; although the present invention is by no means limited as such and may be used to reduce unwanted acoustic vibrations in any system.
- Conveniently, when the present invention is applied to the reduction of acoustic vibrations transmitted along an exhaust pipe, the reference means may comprise either a peak detection filter to detect the frequency of the acoustic vibrations with the largest amplitude, or it can provide a synchronising signal to the rotation rate of the engine. Alternately the resonator controller is operative to detect the frequency of the acoustic vibrations with the largest amplitude by utilising its knowledge of the characteristics of the resonator.
- Examples of the present invention will now be described with reference to the drawings, in which:-
- Figure 1 diagrammatically illustrates the three types of resonators that may be employed in embodiments of the present invention;
- Figure 2 illustrates the use of a quarter wave resonator according to one embodiment of the present invention;
- Figure 3 illustrates the use of a Helmholtz resonator according to a second embodiment of the present invention;
- Figure 4 illustrates the use of a mechanical resonator according to a third embodiment of the present invention;
- Figure 5 illustrates the use of a fluid filled Helmholtz resonator according to a fourth embodiment of the present invention; and
- Figure 6 illustrates the use of a mechanical resonator according to a fifth emodiment of the present invention.
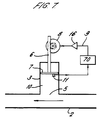
- Figure 7 illustrates the use of a quarter wave resonator according to a further embodiment of the present invention.
- Referring now to the drawings, Figure 1 illustrates three types of resonators that can be employed in cancelling undesired acoustic vibration. The resonators are shown connected to a duct 2, although the present invention is not limited as such.
- The resonator could be a Helmholtz resonator 1 where the air mass in the neck oscillates on the natural spring created by the air in the bulb. Damping is produced partly by flow effects in the neck, but mainly by sound radiation into the duct.
- For the Helmholtz resonator it can be shown that the resonant frequency ωo can be given by

- S =
- neck area
- ℓ =
- neck length
- V =
- bulb volume
- C =
- speed of sound
- Thus the resonant frequency of the resonator can be adjusted by adjustinq the neck length, neck area or bulb volume.
- Alternatively, the resonator could be a quarter
wave length resonator 3, which can be viewed as a special case of a Helmholtz resonator, where the neck and the bulb have the same diameter. Here the effective mass and stiffness are both continuous. - For the quarter wave length resonator it can be shown that the resonant frequency of ω n can be given by

- n =
- 0, 1, 2, ........
- L =
- length of side branch
- C =
- speed of sound
- Thus the resonant frequency of the quarter wave length resonator can be adjusted by varying the length of the side branch. This can be implemented for example by using a sliding piston.
- It should be noted that the quarter wave resonator also has the advantage that resonance not only occurs at the fundamental frequency (n = 0) but also at higher harmonics (n = 1, 2, ...).
- The resonator can also be a mechanical resonator 4 with a piston of mass M on a spring in a side branch.
- For the mechanical resonator it can be shown that the resonance frequency of ωo can be given by

- k =
- spring stiffness
- M =
- piston mass
- To adjust the resonant frequency of this type of resonator the most simple arrangement is to adjust the spring stiffness. This could be adjusted for example by having a variable rate spring or a compressed gas spring where the spring stiffness is proportional to the gas pressure.
- All three resonators described hereinabove have related behaviour at resonance which is typified by:
- 1) the oscillating displacement at the free end (duct end) being a maximum;
- 2) the oscillating force or pressure at the fixed end (or bulb wall in the case of the Helmholtz resonator) being a maximum, and displacement being zero; and
- 3) the force or pressure fluctuations at the free end being 90° out of phase with those at the fixed end (bulb wall).
- Thus in order to measure the resonant frequency of the resonator any one or more of these three parameters can be measured. In measuring any one or more of these parameters, accurate control of the resonator can be implemented since the accurate resonant frequency of the resonator is known. The measurement of, for instance, gas pressure within the resonator has the advantage of automatically compensating for any temperature variations that may occur between the medium in which the undesired acoustic vibrations are being transmitted and the medium contained within the resonant cavity.
- Thus, control schemes that can be used to ensure that resonance is obtained at the desired frequency can be based on the three common behavioural characteristics of the resonator at resonance in that:
- 1) the piston or gas motion at the free end must be maximised;
- 2) the force or pressure at the fixed end (bulb wall) must be maximised; and
- 3) the phase of the force or pressure fluctuations at the fixed end of the resonator must lag those at the free (duct) end by 90°.
- This is exactly true for lightly damped systems and a good approximation for more heavily damped systems.
- The third control arrangement has the advantage that by measuring the phase, one has direct knowledge of which direction to make adjustments of the resonance frequency of the resonator, thus making adaption very fast and robust.
- In view of the feedback control arrangement wherein measurements are made directly of the resonant frequency of the resonator, the control system is fully adaptive and can respond to local changes in the environment (sound, speed, temperature, etc.). The required parameters of the resonator can be measured using transducers and the output of these transducers can be filtered so as to be sensitive only to the frequency of interest, i.e. the undesired acoustic vibration frequency. This frequency is selected according to the desired function of the resonator.
- When any of the resonators hereinbefore described are attached to attenuate acoustic vibrations in a medium (e.g. in a duct), sound travelling in the medium (along the duct) will be reflected at the point of fixture. This is how the resonators operate to minimise transmission of acoustic vibrations through the medium.
- A resonator can be used in the inlet or exhaust of an internal combustion engine to minimise transmitted sound especially at the resonant frequency or frequencies. Thus in one embodiment of the present invention the resonator can be automatically tuned by adjusting its effective mass or spring parameters. The frequency of interest can be selected in several ways. It can have a fixed relation to one harmonic of the engine and can be obtained from an engine tachometer signal for example. Alternatively, it can automatically be chosen to be the frequency at which attenuation would be the most effective at any given time. This could be achieved by identifying the loudest frequency component from for example a tailpipe or inlet microphone and the resonator could be adapted to that frequency. Alternatively, a resonator controller could have stored in a memory the characteristics of the resonator and could perform an algorithm to ascertain the frequency of the acoustic vibrations impinging on the open end of the resonator having the largest amplitude. The resonator could then be tuned to this frequency.
- The use of such resonators need not be confined to use in ducts. For instance the resonators may be used to control noise in a volume such as a vehicle cabin and to improve the efficiency of acoustic attenuation an array of such resonators may be used.
- Specific embodiments incorporating one type of resonator and control system will now be described with reference to Figures 2 and 7 of the drawings.
- Figure 2 illustrates a
quarter wave resonator 3, attached to a duct 2 via anopen end 5. The length of the side branch and hence the resonant frequency of the resonator is adjustable using a piston 6 attached to a movablefar end wall 7 of the resonator. The piston 6 is driven by a motor 8 which is controlled by a control signal transmitted online 9. - Within the
resonant cavity 10 of the quarter wave resonator there is a transducer mounted on the movablefar end wall 7. Thetransducer 11 provides a measure of the dynamic pressure of the gas at the far end wall of the resonator. Signals from thetransducer 11 are filtered by a band-pass filter 12, the centre frequency of which is controlled by a signal online 13 which in this example of this invention is provided from atachometer 14 of an internal combustion engine. Thus the band-pass filter filters the dynamic pressure signals from thetransducer 11 to provide a measure of the dynamic pressure at the selected frequency of the acoustic vibrations to be attenuated. The output signal from the band-pass filter 12 is then input into amaximum signal detector 15 which detects any decrease in the amplitude of the signal at the required frequency. If a decrease is detected then a signal is output via theamplifier 16 online 9 to the motor to move the piston 6 and thefar end wall 7 to adjust the resonant frequency of the resonator. - Figure 3 illustrates a second embodiment of the present invention in which a Helmholtz resonator 1 is connected to a duct 2 via a
neck portion 20. The Helmholtz resonator has aresonant chamber 21 the volume of which can be varied by moving afar end wall 22 by the action of a piston 6 driven by a motor 8. In this example it is also possible to vary the neck length by moving aneck insert 25 which is attached to thefar end wall 22 and moves therewith in unison. The pressure of the gas within theresonant cavity 21 is measured by atransducer 26 whilst the pressure of the gas in the duct 2 is measured bytransducer 27. The signals from these twotransducers pass filters line 28. The signal online 28 represents the selected frequency of the acoustic vibrations to be attenuated, and this signal is provided fromfilter 29 by peak selection filtering of a signal representing the acoustic vibrations at a position in the duct upstream of the resonator as measured by atransducer 30. Thus the selected frequency of the filtered acoustic vibrations that are to be attenuated is decided by selecting the acoustic vibrations in the duct having the largest amplitude. - The signals from the
transducers pass filters multiplier 33. The multiplied signal from themultiplier 33 is then applied to anintegrator 34 which supplies the resonator control signal online 35 to themotor 34 to move the piston 23 andfar end wall 22 in order to change the resonant cavity volume, and hence the resonant frequency of the resonator. - In this example of the present invention the neck length as well as the volume of the Helmholtz resonator is varied. This provides for extra sensitivity, although only one parameter need be varied.
- The two filtered pressure signals provided from
transducers pass filters 

- By choosing a time constant for the
integrator 34 which is long compared to 2π/ωo, but short compared to the time over which ωo is expected to vary, then the integrator output, y(t), will be approximately
- A low pass filter could alternatively be used instead of the
integrator 34 to provide y(t). - Thus at resonance when φ = 90°, the motor drive signal y(t) will be zero. At a frequency below the resonant frequency, φ<90° so that y(t)>0, thus driving the motor one way. At frequency above resonance, φ>90° so y(t)<0, thus driving the motor the other way. In both cases the polarity of the control signal provided on
line 35 can be easily set so that the system is convergent and stable. - Referring now to Figure 4, this diagram illustrates the use of a mechanical resonator 4 attached to a duct 2 for a fluid or gas medium. The mechanical resonator comprises a mass 40 suspended at the interface between the resonator 4 and the duct 2 by a
diaphragm 41. Thediaphragm 41 forms an airtight seal across the interface sealing gas in acavity 42. Thecavity 42 has apreset regulator valve 43 regulating gas provided by apump 44. Thecavity 42 also has a motorisedvalve 45 to control the pressure there within. A transducer in the form of amicrophone 27 is provided within the duct adjacent to the interface with the resonator to provide a measure of the pressure in the duct and hence the force applied to the resonator. In thecavity 42 there is atransducer 47 providing signals indicative of the pressure within thecavity 42. The signals from thetransducers filters filters line 13. The signal online 13 provides a signal representative of the selected frequency of the acoustic vibrations to be attenuated. In this example of the present invention such a signal is provided from thetachometer 14 of an internal combustion engine. - The filtered signals from the
transducers multiplier 33 and the combined signal integrated inintegrator 34 to provide the resonator control signal online 35 which is amplified inamplifier 16 to provide the control signal which controls themotorised valve 45 in order to control the pressure of the gas within thecavity 42. - In operation the
pump 44 provides a constant head of pressure which can be controlled by thepreset regulator valve 43, and the pressure in theresonator cavity 42 is varied by opening or closing themotorised valve 45. - The gas in the
cavity 42 acts as a spring the spring stiffness K1 of which is given by
- Υ =
- ratio of specific heats
- A =
- area
- p =
- pressure of gas
- V =
- volume of cavity
- The resonant frequency ωo of such a resonator can be given by


- K2 =
- diaphragm stiffness
- M =
- diaphragm mass
- Referring now to Figure 5, this diagram illustrates a Helmholtz resonator 1 connected to a duct 2 via a
neck 20. In this arrangement the volume of thecavity 21 within the resonator is varied by partially filling it with anincompressible fluid 60. The control arrangement illustrated in this diagram is the same as that illustrated in Figure 2 for the quarter wave resonator and like reference numerals denote like components. The resonator control signal produced by the controller controls a positive displacement pump 61 which pumps fluid either from or to thereservoir 62. - Referring now to Figure 6, this diagram illustrates use of the same control system as described in Figures 2 and 5 to control a mechanical resonator 4. In this diagram like reference numerals denote like components. The
mass 40 is provided with anaccelerometer 46 which measures the motion of themass 40. The signal provided from the accelerometer is equivalent to that provided by thetransducer 47 in Figure 4. The signal from this is then utilised by the control system as described in relation to Figures 2 and 5 to control themotorised valve 45 as described with respect to Figure 4. - Referring now to Figure 7, this diagram illustrates the use of a quarter wave resonator as described in relation to Figure 2. However, in this embodiment, the resonator controller is different and comprises a
digital processing apparatus 70 which has stored characteristics of the resonator to enable it to deconvolve the effects of the resonator on the acoustic vibrations impinging on theopen end 5 of the resonator and hence determine the frequency component of the acoustic noise with the largest amplitude. A control signal is then output online 9 to the motor 8 to tune the resonator to the frequency at which the largest amplitude has been detected. In this system the characteristics of the resonator need be input to the processor only once and the system needs no reference signals. This system could be used where only small changes in the fluid properties (temperature etc.) are expected. - A method according to one embodiment of the present invention of controlling a resonator will now be described with reference to Figures 2, 5 and 6.
- A first signal indicative of the vibrations in the
resonator 1, 3 or 4, is band-pass filtered with the centre frequency of the band-pass filter 12 being set at the selected frequency of the acoustic vibrations to be attenuated, the centre frequency being controlled by a second signal on theline 13. The amplitude of this filtered signal is then detected by amaximum signal detector 15 and a resonator control signal output to maximise the amplitude of the measured first signal at the selected frequency of the acoustic vibrations to be attenuated. The first signal can either be a measure of the motion of the mass 40 in a mechanical resonator 4 or it can be a measure of the pressure at a point within theresonant cavity - A method of controlling a resonator to attenuate undesired acoustic vibrations according to a second embodiment of the present invention will now be described with reference to Figures 3 and 4.
- First signals from the
first transducers second transducers 27 are band-pass filtered at the selected frequency of the acoustic vibration to be attenuated. The filtered signals are then multiplied and integrated or filtered to provide a resonator control signal online 35. The resonator control signal will be output whenever the phase difference between the signals from the first andsecond transducers second transducers integrator 34 gives an indication of the direction in which to adjust the resonant frequency. - When a resonator and control system as hereinbefore described is used to cancel undesired acoustic noise in a duct, it may be the case that significant force is transmitted to the resonator housing by the action of the resonator. To minimise vibration generated in this way a symmetric arrangement of resonators, or a resonator of intrinsic axial symmetry can be used.
- The control systems illustrated in Figures 2 to 6 may be implemented either digitally or in an analogue manner.
- The present invention can thus provide a compact unit comprising a resonator and a control system for use in the attenuation of undesired acoustic vibrations in a system such as a duct.
Claims (31)
- Apparatus for attenuating acoustic vibrations in a medium, said apparatus comprising a tunable acoustic resonator with an open end for interfacing with said medium outside of said resonator, at least one transducer to provide a first signal indicative of a dynamic parameter of said medium within the resonator, and a resonator controller operable in response to said first signal to tune said resonator to a selected frequency of said acoustic vibrations.
- Apparatus as claimed in Claim 1, wherein said resonator controller is operative to determine said selected frequency in response to a predetermined characteristic of said first signal indicative of the dynamic parameter of said medium and to tune said resonator so as to maximise the amplitude of said first signal at said selected frequency.
- Apparatus as claimed in Claim 1 including reference means providing a reference signal indicative of said selected frequency, wherein said resonator controller is operative to tune said resonator so as to maximise the amplitude of said first signal indicative of the dynamic parameter of said medium at said selected frequency.
- Apparatus as claimed in Claim 3, wherein said resonator controller includes filter means for band-pass filtering said first signal indicative of the dynamic parameter of said medium at said reference signal frequency, said resonator controller being operative to tune said resonator so as to maximise the amplitude of the band-pass filtered first signal.
- Apparatus as claimed in Claim 1 including a second transducer to provide a second signal indicative of a dynamic parameter of said medium outside of said resonator and reference means providing a reference signal indicative of said selected frequency, wherein said resonator controller is operative to tune said resonator so as to maintain the phase difference between the first and second signals at said selected frequency substantially at 90°.
- Apparatus as claimed in Claim 5, wherein said resonator controller includes a band-pass filter for each of said first and second signals, to band-pass filter each said signal at said reference signal frequency, a multiplier to receive the filtered signals and output a combined signal and an integrator or low pass filter to receive the combined signal and output a resonator control signal.
- Apparatus as claimed in Claim 1, wherein said resonator has a resonant chamber and a first transducer mounted therein to provide the first signal which is a measure of the dynamic pressure of the medium at a point within said resonant chamber, remote from said open end of said resonator.
- Apparatus as claimed in any preceding claim, wherein said resonator is a Helmholtz resonator.
- Apparatus as claimed in Claim 7, wherein said resonator is a quarter wave resonator and said first transducer is mounted at a far end wall of said resonant chamber.
- Apparatus as claimed in Claim 8 or Claim 9, wherein said resonator controller comprises means to move a far end wall of said resonant chamber.
- Apparatus as claimed in any of Claims 1 to 7, wherein said resonator is a mechanical resonator with a sprung mass, said mass having a motion transducer attached thereto to provide the first signal which is a measure of the motion of said mass.
- Apparatus as claimed in Claim 11, wherein said motion transducer is an accelerometer to provide a measure of the acceleration of said mass.
- Apparatus as claimed in Claim 11 or Claim 12, wherein said mass is suspended by a diaphragm adjacent said open end of said resonator and the spring effect is provided by a gas contained in a chamber by said diaphragm.
- Apparatus as claimed in Claim 13, wherein the pressure of the gas within the cavity is controlled by said resonator controller.
- Apparatus as claimed in any of Claims 5 to 14 including a second transducer mounted in said medium outside of said resonator to provide said second signal which is indicative of the dynamic pressure within said medium outside of said resonator.
- Apparatus as claimed in any preceding claim adapted to reduce the transmission of undesired acoustic vibration along a duct.
- Apparatus as claimed in any preceding claim adapted to reduce the transmission of acoustic vibration along an exhaust pipe from an internal combustion engine.
- Apparatus as claimed in any of Claims 3 to 17, wherein said reference means comprises a peak detection filter to detect the frequency of the acoustic vibrations with the largest amplitude and output said reference signal at said frequency.
- Apparatus as claimed in Claim 17, wherein said reference means is operative to synchronise said reference signal to the rotation rate of said engine.
- A method of attenuating acoustic vibrations in a medium comprising the steps of interfacing a tunable acoustic resonator with said medium outside of said resonator, measuring a dynamic parameter of the medium within said resonator to give a first signal, and tuning said resonator to a selected frequency of said acoustic vibrations in response to said first signal.
- A method as claimed in Claim 20 including the steps of determining said selected frequency in response to a predetermined characteristic of said first signal indicative of the dynamic parameter of the medium within the resonator and tuning said resonator so as to maximise the amplitude of said first signal at said selected frequency.
- A method as claimed in Claim 20 including the steps of measuring said selected frequency to provide a reference signal, and tuning said resonator so as to maximise the amplitude of said first signal indicative of the dynamic parameter of the medium within the resonator at said selected frequency.
- A method as claimed in Claim 22 including the steps of band-pass filtering said first signal at said reference signal frequency and tuning said resonator so as to maximise the amplitude of the band-pass filtered first signal.
- A method as claimed in Claim 20 including the steps of measuring said selected frequency to provide a reference signal, providing a second signal, and tuning said resonator so as to maintain the phase difference between the first and second signals at said selected frequency substantially at 90°.
- A method as claimed in Claim 24 including the step of band-pass filtering each of said first and second signals at said reference signal frequency, multiplying the filtered signals and integrating the multiplied signals to provide a resonator control signal.
- A method as claimed in any of Claims 20 to 25, including the step of measuring the dynamic pressure of the medium in the resonator at a point in a chamber of said resonator, remote from the interface of said resonator with said medium, to provide the first signal.
- A method as claimed in Claim 26, wherein said step of tuning said resonator includes the step of moving a far end wall of said chamber.
- A method as claimed in any of Claims 20 to 26, wherein said resonator is a mechanical resonator with a sprung mass, said method including the step of measuring the motion of said mass to provide the first signal.
- A method as claimed in Claim 28, wherein the motion of said mass is measured using an accelerometer.
- A method as claimed in Claim 28 or Claim 29, wherein said mass is suspended by a diaphragm and is adjacent to said interface, and said spring effect is provided by a chamber containing gas, said method including the steps of tuning said resonator by controlling the pressure of said gas in said chamber.
- A method as claimed in any of Claims 24 to 30 including the step of measuring the dynamic pressure within said medium outside of said resonator to provide said second signal.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| GB9103689A GB2253076B (en) | 1991-02-21 | 1991-02-21 | Method and apparatus for attenuating acoustic vibrations in a medium |
| GB9103689 | 1991-02-21 | ||
| PCT/GB1992/000314 WO1992015088A1 (en) | 1991-02-21 | 1992-02-21 | Method and apparatus for attenuating acoustic vibrations in a medium |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0572492A1 EP0572492A1 (en) | 1993-12-08 |
| EP0572492B1 true EP0572492B1 (en) | 1997-11-19 |
Family
ID=10690378
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP92905463A Expired - Lifetime EP0572492B1 (en) | 1991-02-21 | 1992-02-21 | Method and apparatus for attenuating acoustic vibrations in a medium |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP0572492B1 (en) |
| JP (1) | JPH06510870A (en) |
| DE (1) | DE69223238T2 (en) |
| GB (1) | GB2253076B (en) |
| WO (1) | WO1992015088A1 (en) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8077873B2 (en) | 2009-05-14 | 2011-12-13 | Harman International Industries, Incorporated | System for active noise control with adaptive speaker selection |
| US8135140B2 (en) | 2008-11-20 | 2012-03-13 | Harman International Industries, Incorporated | System for active noise control with audio signal compensation |
| US8189799B2 (en) | 2009-04-09 | 2012-05-29 | Harman International Industries, Incorporated | System for active noise control based on audio system output |
| US8199924B2 (en) | 2009-04-17 | 2012-06-12 | Harman International Industries, Incorporated | System for active noise control with an infinite impulse response filter |
| US8718289B2 (en) | 2009-01-12 | 2014-05-06 | Harman International Industries, Incorporated | System for active noise control with parallel adaptive filter configuration |
| US9020158B2 (en) | 2008-11-20 | 2015-04-28 | Harman International Industries, Incorporated | Quiet zone control system |
| CN109654067A (en) * | 2017-10-12 | 2019-04-19 | 英业达科技有限公司 | Quiet fan |
Families Citing this family (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE4243280C2 (en) * | 1992-12-21 | 1996-03-28 | Bayer Ag | Device for silencing pipes |
| DE4402699C2 (en) * | 1994-01-29 | 1996-01-11 | Continental Ag | Device for reducing tire / road noise |
| US5710714A (en) * | 1995-11-15 | 1998-01-20 | Applied Power Inc. | Electronic controller for an adaptively tuned vibration absorber |
| US5920173A (en) * | 1995-11-15 | 1999-07-06 | Applied Power Inc. | Feedback enhanced adaptively tuned vibration absorber |
| US5695027A (en) * | 1995-11-15 | 1997-12-09 | Applied Power Inc. | Adaptively tuned vibration absorber |
| JPH09212175A (en) * | 1996-01-30 | 1997-08-15 | Ricoh Co Ltd | Silencer |
| US5930371A (en) * | 1997-01-07 | 1999-07-27 | Nelson Industries, Inc. | Tunable acoustic system |
| US6295363B1 (en) | 1997-03-20 | 2001-09-25 | Digisonix, Inc. | Adaptive passive acoustic attenuation system |
| DE19743482A1 (en) * | 1997-10-01 | 1999-04-08 | Mann & Hummel Filter | Silencer with a shunt resonator |
| DE19841975B4 (en) * | 1998-09-14 | 2004-02-12 | Continental Aktiengesellschaft | Sound absorbing plate |
| DE19861018C2 (en) * | 1998-12-15 | 2001-06-13 | Fraunhofer Ges Forschung | Controlled acoustic waveguide for sound absorption |
| DE10002984C1 (en) | 2000-01-24 | 2001-08-09 | Daimler Chrysler Ag | Acoustic absorber and method for sound absorption |
| DE10159487C1 (en) * | 2001-12-04 | 2003-02-20 | Eberspaecher J Gmbh & Co | Active sound damping device for automobile engine exhaust has counter sound generated by reciprocation of piston at constant ratio to engine revs |
| AU2002347185A1 (en) | 2002-01-16 | 2003-07-30 | Alstom Technology Ltd | Combustion chamber and damper arrangement for reduction of combustion chamber pulsations in a gas turbine plant |
| EP1508053A2 (en) | 2002-05-08 | 2005-02-23 | Koninklijke Philips Electronics N.V. | A magnetic resonance imaging (mri) system comprising acoustic resonators for noise suppression |
| ATE384412T1 (en) * | 2003-04-28 | 2008-02-15 | Oticon As | MICROPHONE, HEARING AID WITH A MICROPHONE AND INLET STRUCTURE FOR A MICROPHONE |
| GB201108917D0 (en) * | 2011-05-27 | 2011-07-13 | Rolls Royce Plc | A Hydraulic damping apparatus |
| DE102012019318A1 (en) * | 2012-10-02 | 2014-04-03 | Mann + Hummel Gmbh | Silencer for gas-carrying pipe in internal combustion engine, has primary acoustic portions and secondary acoustic portions which are connected through common connecting elements connected to gas-conducting pipe |
| DE102015103936A1 (en) * | 2015-03-17 | 2016-09-22 | Hochschule für Angewandte Wissenschaften Hamburg Körperschaft des Öffentlichen Rechts | Sound insulation device with a membrane and a mass |
| EP3070710A1 (en) * | 2015-03-18 | 2016-09-21 | Plum Sp. z o.o. | Method for measuring sound in a waveguide, especially in a ventilation system, and a device for implementing the method |
| US11762304B2 (en) | 2015-05-06 | 2023-09-19 | Asml Netherlands B.V. | Lithographic apparatus |
| JP6527828B2 (en) * | 2016-02-08 | 2019-06-05 | 飛島建設株式会社 | General purpose silencer |
| DE102018103175B3 (en) | 2018-02-13 | 2019-03-21 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | rotor assembly |
| DE102018004486A1 (en) * | 2018-06-03 | 2019-12-05 | Gesellschaft für Akustikforschung Dresden mbH | Device for damping and / or absorbing sound |
| US11193693B2 (en) * | 2018-09-05 | 2021-12-07 | Denso International America, Inc. | Sound suppression chamber for an HVAC air handling assembly |
| DE102018219729A1 (en) * | 2018-11-16 | 2020-05-20 | Robert Bosch Gmbh | Device for determining at least one parameter of a fluid medium flowing in a flow tube |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4281741A (en) * | 1979-10-01 | 1981-08-04 | General Motors Corporation | Compact exhaust silencer for diesel locomotives |
| EP0050621A1 (en) * | 1980-04-28 | 1982-05-05 | KOOPMANN, Gary H. | Noise reduction system |
| FR2489881A1 (en) * | 1980-09-08 | 1982-03-12 | Peugeot | INCORPORATED RESONATOR EXHAUST MUFFLER, FOR COMBUSTION ENGINE |
| NL8602537A (en) * | 1986-10-09 | 1988-05-02 | Zwaan Adrianus J | SOUNDPROOFING VENTILATION DEVICE, IN PARTICULAR FOR A VENTILATION TRANSIT IN A WALL OR WALL. |
| DE3729765A1 (en) * | 1987-09-05 | 1989-03-16 | Bayerische Motoren Werke Ag | Sound absorption system |
-
1991
- 1991-02-21 GB GB9103689A patent/GB2253076B/en not_active Revoked
-
1992
- 1992-02-21 WO PCT/GB1992/000314 patent/WO1992015088A1/en active IP Right Grant
- 1992-02-21 EP EP92905463A patent/EP0572492B1/en not_active Expired - Lifetime
- 1992-02-21 DE DE69223238T patent/DE69223238T2/en not_active Expired - Lifetime
- 1992-02-21 JP JP4505039A patent/JPH06510870A/en active Pending
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8135140B2 (en) | 2008-11-20 | 2012-03-13 | Harman International Industries, Incorporated | System for active noise control with audio signal compensation |
| US8270626B2 (en) | 2008-11-20 | 2012-09-18 | Harman International Industries, Incorporated | System for active noise control with audio signal compensation |
| US8315404B2 (en) | 2008-11-20 | 2012-11-20 | Harman International Industries, Incorporated | System for active noise control with audio signal compensation |
| US9020158B2 (en) | 2008-11-20 | 2015-04-28 | Harman International Industries, Incorporated | Quiet zone control system |
| US8718289B2 (en) | 2009-01-12 | 2014-05-06 | Harman International Industries, Incorporated | System for active noise control with parallel adaptive filter configuration |
| US8189799B2 (en) | 2009-04-09 | 2012-05-29 | Harman International Industries, Incorporated | System for active noise control based on audio system output |
| US8199924B2 (en) | 2009-04-17 | 2012-06-12 | Harman International Industries, Incorporated | System for active noise control with an infinite impulse response filter |
| US8077873B2 (en) | 2009-05-14 | 2011-12-13 | Harman International Industries, Incorporated | System for active noise control with adaptive speaker selection |
| CN109654067A (en) * | 2017-10-12 | 2019-04-19 | 英业达科技有限公司 | Quiet fan |
Also Published As
| Publication number | Publication date |
|---|---|
| JPH06510870A (en) | 1994-12-01 |
| GB9103689D0 (en) | 1991-04-10 |
| EP0572492A1 (en) | 1993-12-08 |
| DE69223238D1 (en) | 1998-01-02 |
| GB2253076B (en) | 1994-08-03 |
| GB2253076A (en) | 1992-08-26 |
| WO1992015088A1 (en) | 1992-09-03 |
| DE69223238T2 (en) | 1998-05-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0572492B1 (en) | Method and apparatus for attenuating acoustic vibrations in a medium | |
| EP0636267B1 (en) | Extended frequency range helmholtz resonators | |
| US5797266A (en) | Device for actively controlling combustion instabilities and for decoking a fuel injector | |
| US9791342B2 (en) | Combination static and dynamic pressure transducer employing a micro-filter | |
| Rowley et al. | Linear models for control of cavity flow oscillations | |
| US4811595A (en) | System for monitoring fluent material within a container | |
| JP2706051B2 (en) | Vibration damping device | |
| US4098133A (en) | Vibrating diaphragm fluid pressure sensor device | |
| JPH11502032A (en) | Active suppression of aircraft engine inlet noise using small sound sources and distributed error sensors | |
| Hurst et al. | An experimental frequency response characterization of MEMS piezoresistive pressure transducers | |
| US6778673B1 (en) | Tunable active sound absorbers | |
| US4637261A (en) | Mass-flow sensing transducer for internal combustion engines | |
| US4656864A (en) | Fuel control system for internal combustion engines | |
| Balantrapu et al. | The dynamic response of a pinhole microphone under flows of varying shear stress | |
| Singh et al. | Tuning a semi-active Helmholtz resonator | |
| Horowitz | Design and characterization of compliant backplate Helmholtz resonators | |
| Tack et al. | Wall pressure correlations in turbulent airflow | |
| US11255718B2 (en) | Systems and methods for extending frequency response of resonant transducers | |
| JPH0626449A (en) | Active type pulsation pressure absorber | |
| WO2002023136A1 (en) | A device and a method for measuring the flow in a fluid | |
| JPS5847644B2 (en) | Internal combustion engine intake air flow measurement device | |
| Singh et al. | The elusive cost function for tuning adaptive Helmholtz resonators | |
| JP3265715B2 (en) | Active vibration control device for vehicle and active noise control device for vehicle | |
| CA1183594A (en) | Absolute pressure sensor | |
| EP0636287B1 (en) | An improved adaptive resonator vibration control system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19930813 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE FR GB IT NL SE |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| 17Q | First examination report despatched |
Effective date: 19960920 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE FR GB IT NL SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19971119 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRE;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED.SCRIBED TIME-LIMIT Effective date: 19971119 |
|
| REF | Corresponds to: |
Ref document number: 69223238 Country of ref document: DE Date of ref document: 19980102 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 19980219 |
|
| ET | Fr: translation filed | ||
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20110223 Year of fee payment: 20 Ref country code: FR Payment date: 20110317 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20110222 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69223238 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 69223238 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: PE20 Expiry date: 20120220 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20120222 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20120220 |